Build a Mammoth Ramp Walker
Use the fundamentals of physics to create a “walking” mammoth
Print Version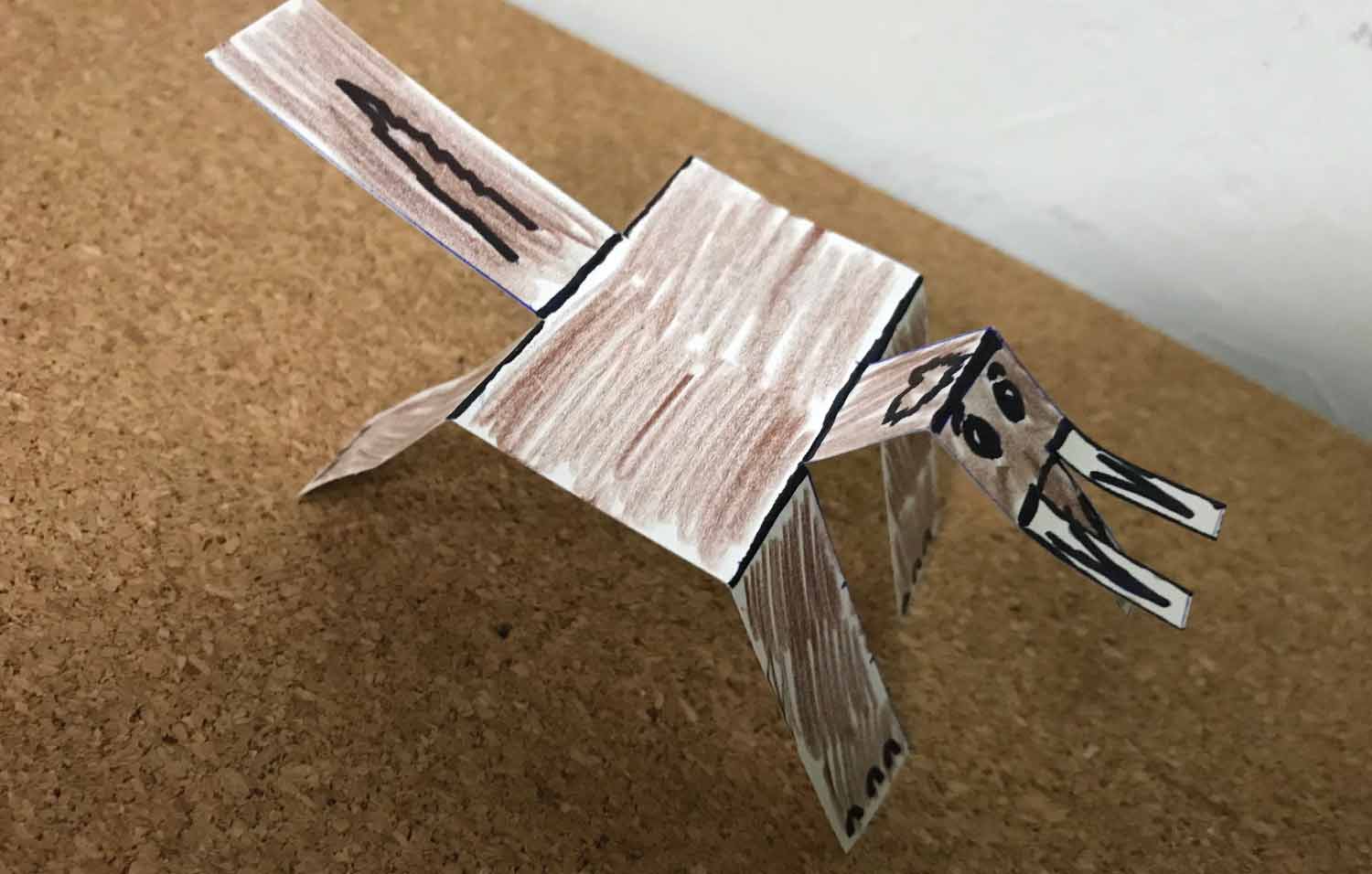
What you’ll need:
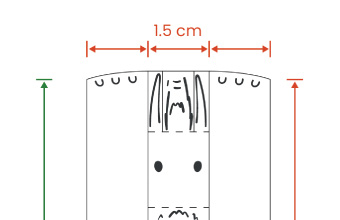
- Mammoth ramp walker template
- Printer
- Card stock or recycled cardboard
- Scissors
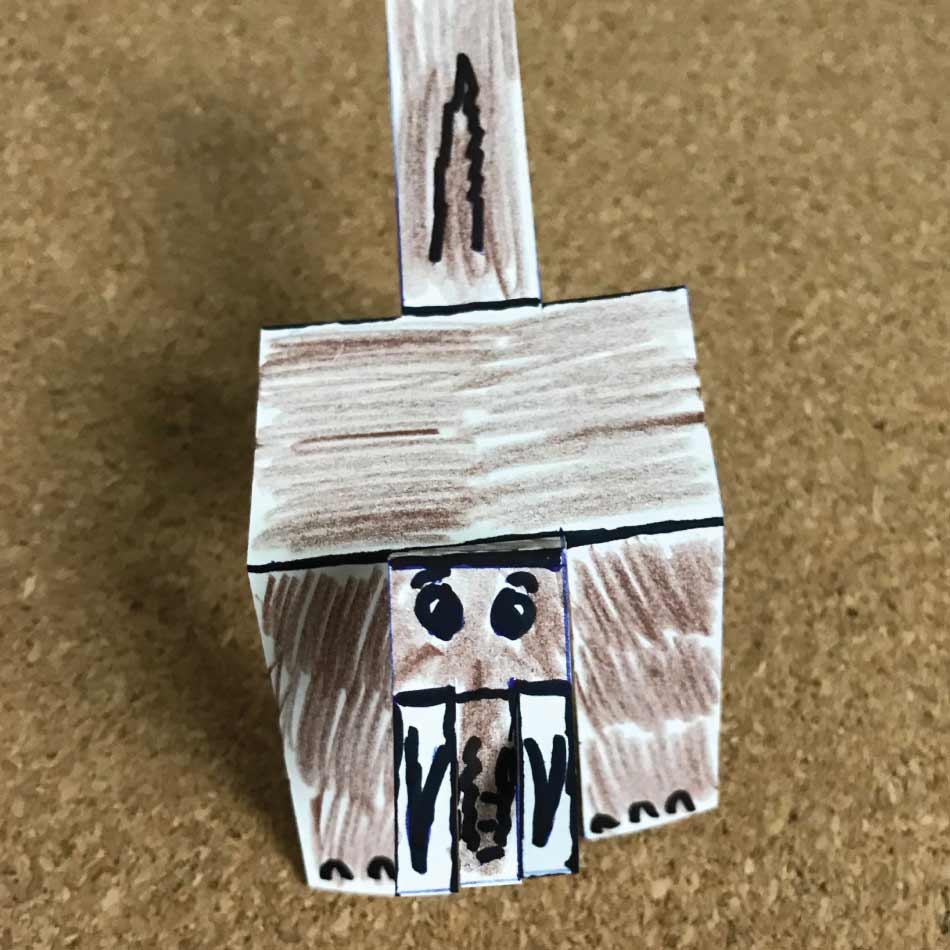
- Markers, pencil crayons or other materials for decorating your mammoth
- A rough, textured surface, like corkboard or a plank of wood
- Something sturdy to prop up the planks, like books
No printer? No problem! Grab a pencil and ruler to draw your own template using the measurements provided.